
Portfolio
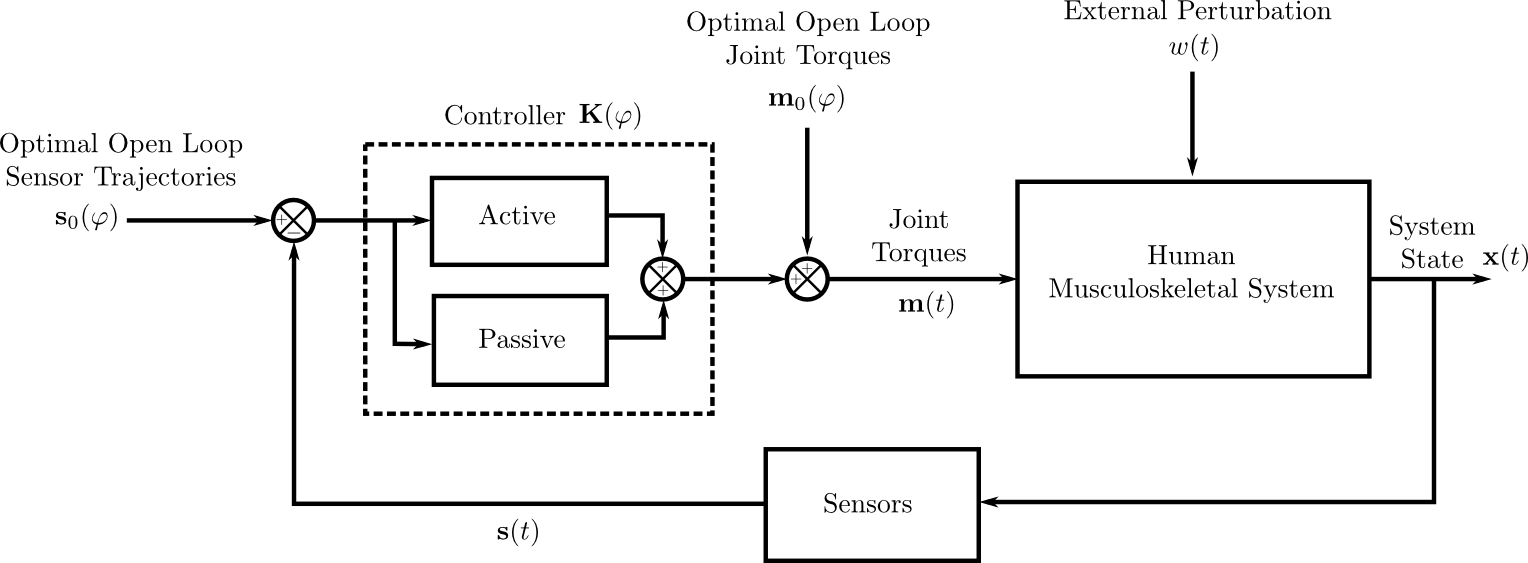
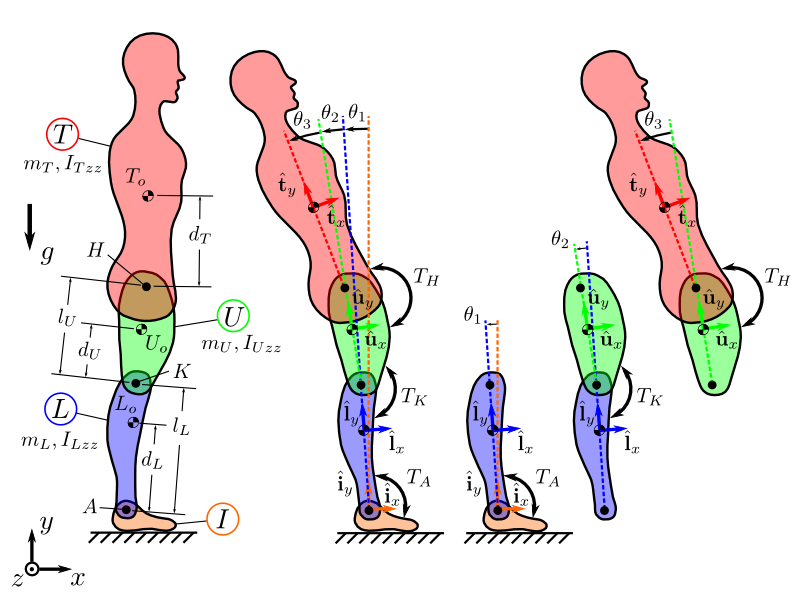
During my post doc at Cleveland State University, I worked with Ton van den Bogert and developed methods to identify the human's controller during gait. We developed both direct and indirect identification methods and methods for identifying a gain gait scheduled controller for planar walking. The motivation was to develop a controller that could possibly be used in powered lower extremity prostheses, such as an exoskeleton.
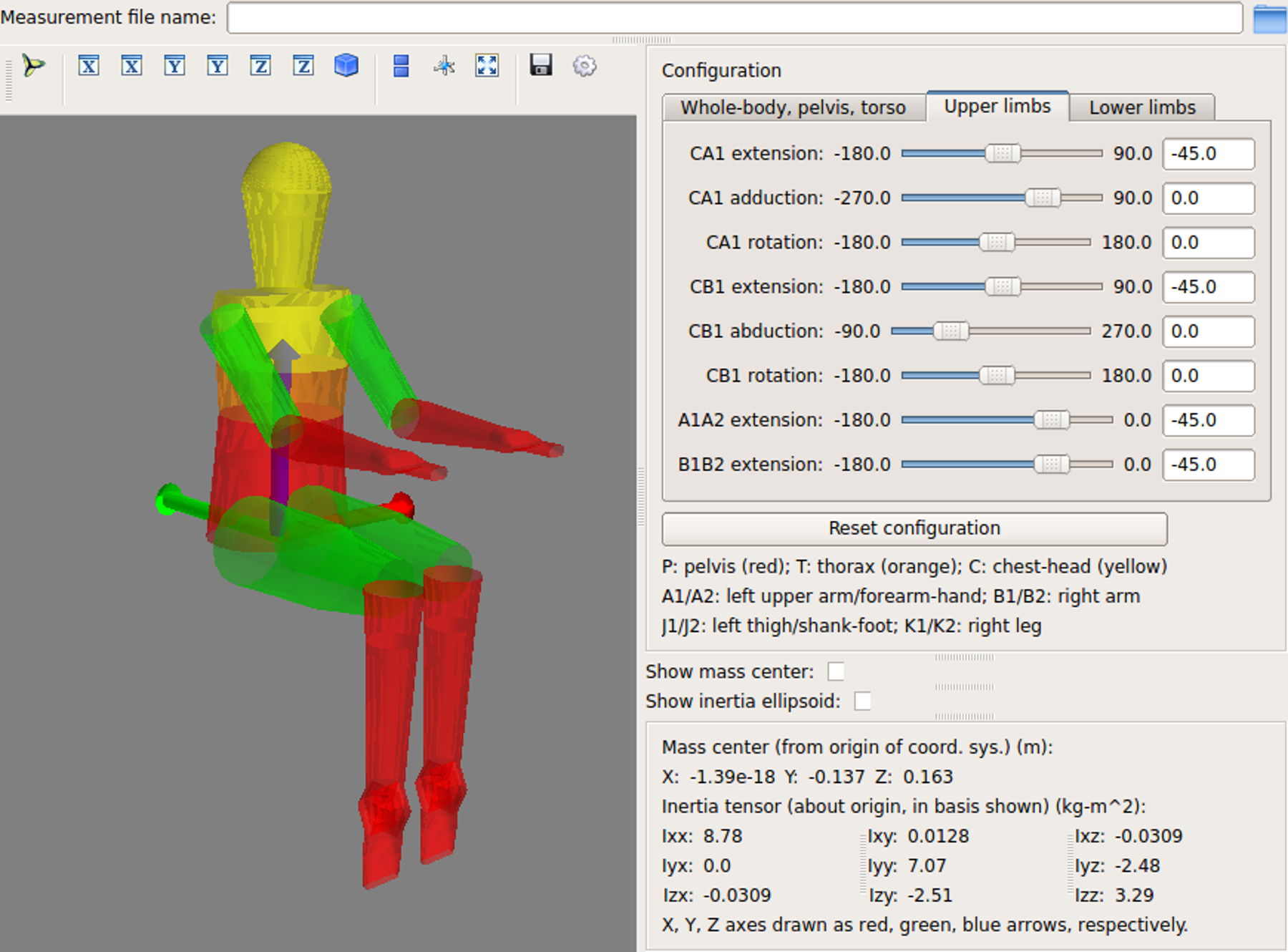
yeadon is a software package that implements Fred Yeadon's popular method for estimating the body segment parameters of a human. The package can be used as library, as in BicycleParameters, or as a standalone GUI application.

American made Indian influenced cargo rickshaw.

My graduate work at UC Davis was rounded out with a project that focused on identifying the control actions employed by a human during simple bicycle maneuvers. I constructed an instrumented bicycle and collected a great deal of data during a series of experiments in which the rider attempted to balance a bicycle under the influence of lateral perturbations. This data was then used to identify both a plant and control model of the underlying system and validate our hypotheses about the rider's control structure.
PyDy is a general tool for mutlibody dynamic analysis written in Python.

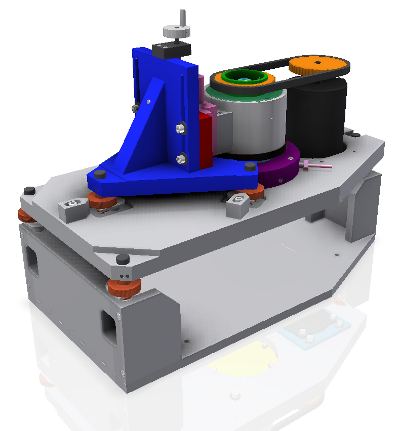
Biomedical blood cell shearing device machine design.

I have an interest in the appropriate use of human power for various tasks.

The pedal powered laptop charging station and energy demonstration device.

Appropriate technologies for the disabled in Zambia.

To accurately model the bicycle and rider system, the basic physical parameters of the bicycle and the rider must be measured or estimated. These parameters include the geometry, mass, mass locations, and mass distribution of all the bodies in the system at the most basic level and but may include any other constants such as frictional coefficients, damping constants, etc. Starting at TU Delft with Jodi Kooijman's tools and methods, I refined a technique for measuring both the bicycle and rider's basic parameters.
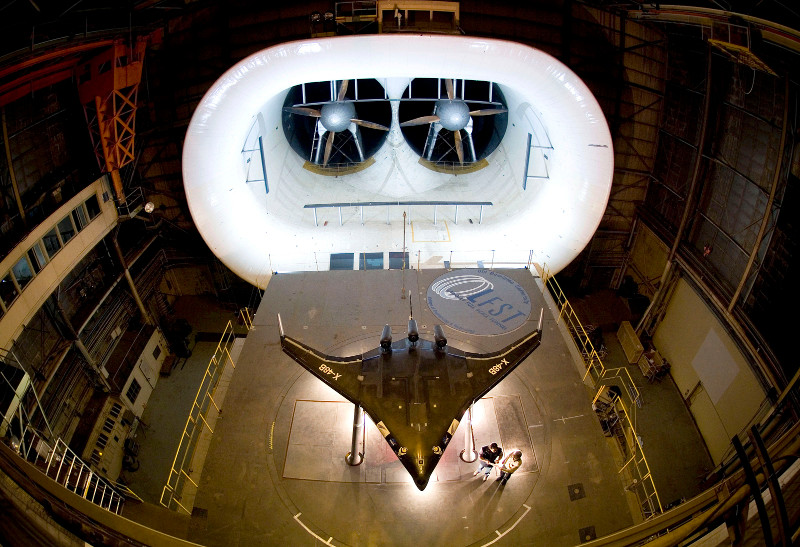
As a design engineer at the Langley Full Scale Tunnel (NASA Langley's 30' x 60' wind tunnel) I designed a full scale automotive balance to measure lift and drag forces/moments as well as other anscilary design and fabrication tasks.

Reverse engineering and CAD modeling of campus Maglev train.

ODU human powered vehicle senior design project.
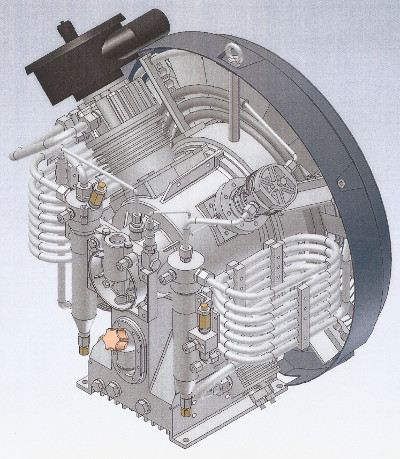
CAD modeling and machine design internship at Bauer Compressors in Norfolk, VA.