Indirect Identification of Human Control During Walking
Jason K. Moore j.k.moore19@csuohio.edu
Human Motion and Control Laboratory [hmc.csuohio.edu]
Cleveland State University, Cleveland, Ohio, USA
July 15, 2014
About
- Currently a post doc in Ton van den Bogert's Human Motion and Control Lab at Cleveland State University
- Graduate work was at UC Davis (Hubbard/Hess: Sports Biomech Lab) and TU Delft (Schwab: Bicycle Dynamics Lab) where I worked on the human control identification during bicycle balancing
- Active in the Scientific Python Community (SymPy/PyDy)
Our big picture questions
What are the fundamental control mechanisms used during human gait?
- Zero moment point control: Asimo, etc?
- Optimal control: maximize stability, minimize energy, etc?
- Something else?
What control mechanisms can powered prosthetics utilize to recreate able bodied human gait?
- Maybe the previous are good choices, maybe not.
- Is it possible to develop a data driven controller for a particular prosthetic that behaves like a human, defects and all?
- What can common gait lab data from able-bodied humans tell us about the control mechanisms during gait? Can we measure what we really want to?
- What kind of experiments can generate rich data needed to identify controllers?
How can we identify these controllers from large sets of gait data?
Maybe standard system identification methods?
- Direct Approach
- Indirect Approach
Our goal
Desired Improvements
Additional Benefits
|
|
Our current approach
- Collect common gait data from many gait cycles (500-1000)
- During cycles, apply pseudo-random external perturbations to the human
- Assume a simple time varying linear MIMO black box control structure
- Find the best fit of the control model to the data with a direct approach
- Test the resulting controller(s) in simulation and in actual devices (in progress)
Idealized Gait Feedback Control

Estimated
|
Unknown
|
Controller Equations
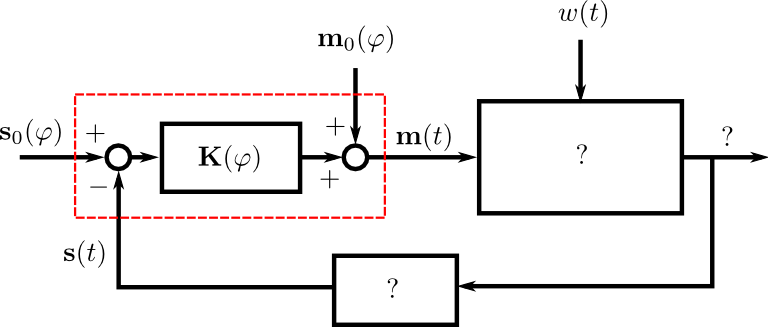
\[ \mathbf{m}(t) = \mathbf{m}_0(\varphi) + \mathbf{K}(\varphi) [\mathbf{s}_0(\varphi) - \mathbf{s}(t)] \\ \] \[ \mathbf{m}(t) = \mathbf{m}^*(\varphi) - \mathbf{K}(\varphi) \mathbf{s}(t) \] where \[ \mathbf{m}^*(t) = \mathbf{m}_0(\varphi) + \mathbf{K}(\varphi) \mathbf{s}_0(\varphi) \]
Gain Matrix: Planar Walker
Sensors
Assume that a lower limb exoskeleton can sense relative orientation and rate of the right and left planar ankle, knee, and hip angles.
\(\mathbf{s}(t) = \begin{bmatrix} s_1 & \dot{s}_1 & \ldots & s_q & \dot{s}_q \end{bmatrix} \) where \(q=6\)
Controls (plant inputs)
Assume that the exoskeleton can generate planar ankle, knee, and hip joint torques.
\(\mathbf{m}(t) = \begin{bmatrix}m_1 & \ldots & m_q \end{bmatrix} \) where \(q=6\)
Gain Matrix [Proportional-Derivative Control]
\( \mathbf{K}(\varphi) = \begin{bmatrix} k(\varphi)_{s_1} & k(\varphi)_{\dot{s_1}} & 0 & 0 & 0 & \ldots & 0\\ 0 & 0 & k(\varphi)_{s_2} & k(\varphi)_{\dot{s_2}} & 0 & \ldots & \vdots\\ 0 & 0 & 0 & 0 & \ddots & 0 & 0\\ 0 & 0 & 0 & \ldots & 0 & k(\varphi)_{s_q} & k(\varphi)_{\dot{s}_q} \\ \end{bmatrix} \)
Linear Least Squares
With \(n\) time samples in each gait cycle and \(m\) cycles there are \(mnq\) equations and which can be used to solve for the \(nq(p+1)\) unknowns: \(\mathbf{m}^*(\varphi)\) and \(\mathbf{K}(\varphi)\). This is a classic overdetermined system of linear equations that can be solved with linear least squares.
\[\mathbf{A}\mathbf{x}=\mathbf{b}\] \[\hat{\mathbf{x}}=(\mathbf{A}^T\mathbf{A})^{-1}\mathbf{A}^T\mathbf{b}\]
- \(n=20,m\sim=400,q=6,p=12\)
- \(\mathbf{A}\) (48000 x 1560): joint angles and rates
- \(\mathbf{b}\) (48000 x 1): joint torques
- \(\mathbf{x}\) (1560 x 1): \(\mathbf{K}(\varphi)\) and \(\mathbf{m}^*(\varphi)\)
Random Belt Speed Variations

|
Gains: v=0.8 m/s

Gain variation with speed

How good is the model?

Can we put this controller into an exoskeleton?
Maybe
Issues
- Difficult to validate the control law
- Does the result reflect the inverse of plant or the controller?
- In general, a plant is required to validate controller
Other approaches need to be explored
Indirect Identification
- Choose a plant model
- Choose a controller structure (black or grey box)
- Formulate the close loop system equations of motion
- Formulate a cost function based on minimizing the error in the simulated outputs and the gait measurements (marker coordinates, GRFs)
- Search for optimal controller that reproduces the data
- Potential optimization methods:
- simulation + genetic algorithms (shooting)
- discretization + nonlinear programming (direct collocation)
Controller Choice
Grey box
- Feedback/feedforward elements
- Muscle-reflex control [Geyer et. al 2010]
- Neuro time delay
Black box
- Full state/output feedback
- Gait phase gain scheduling
- Neural networks [Tan et. al 2014]
Shooting
Free parameters
\( \mathbf{\theta} = \mathbf{x}_0, p_1, ..., p_q\), \(q = 100\) to \(300\)
Gradient free parallel optimization methods
- Covariance Matrix Adaptation [Hansen 2006]
- Biogeography-based [Simon 2008]
Cost function
- Minimize model error wrt measurements \( J(\theta) = \sum_{i=1}^M || y_{mi} - y_i || \)
- Penalize large trajectory excursions
- Penalize rapid energy use
Computational Costs
- 1000-3000 iterations for 10 second simulation
- 10-12 hr computational time for convergence
- See Wang et.al 2010 and Geijtenbeek et. al 2013
I need a 25x to 50x simulation speedup (480 second simulation) to have 1 day turn around on solutions
Direct Collocation Variables
|
|
Direct Collocation Model Formulation
Free Parameters
\( \theta = \mathbf{x}_1, \ldots, \mathbf{x}_N, \mathbf{u}^u_1, \ldots, \mathbf{u}^u_N, p_1, \ldots, p_q \) ~1M
Cost Function and Gradient
\( J(\theta) = \sum_{i=1}^M || y_{mi} - y_i || \)
Constraints and Jacobian
\(0 = \mathbf{f}(\dot{\mathbf{x}}, \mathbf{x}, \mathbf{u}, t)\) has to hold at each discrete time instance
Backward Euler Discretization
\( 0 = \mathbf{f}_j(\mathbf{x}_j, \mathbf{x}_{j-1}, \mathbf{u}^k_j, \mathbf{u}^u_j, \mathbf{u}^u_{j-1}, p_1, \ldots, p_q) \in \mathbb{R}^n \quad j=2,\ldots,N \)
\(N \approx 1,000,000\)
Direct Collocation Solution
Plant Model
Simple 2D torque actuated 10 DoF planar walker (Opensim gait10dof18musc)
Control Model
- A simpler version of the phase muscle-reflex controller in Wang et. al 2010
- Simple PD gain gait phase scheduled controller + optimal open loop joint torques
Data
- 2D marker locations
- Ground reaction loads
Solvers
- Interior Point Optimization: IPOPT (included in Simbody)
- Sequential Quadratic Programming: SNOPT
- Other ...
Direct Collocation Hurdles
- Computational speed with ~1,000,000 constraints
- Efficient sparse Jacobian computations: Simbody/Opensim only offer numerical gradients. Automatic differentiation is an option.
- Local minima
- Initial guesses
Plan
- Week 1-2: Develop (or use) a closed loop planar walker system in Simbody/Opensim
- Week 3: Evaluate which optimization method is most tractable
- Week 3-4: Implement the identification method
- Week 5: Hack solutions to everything that doesn't work as planned
Goal
Desired result is to let the data tell us what the controller is
Information
Contact
- HMC Lab: hmc.csuohio.edu
- My website: moorepants.info
- Email: j.k.moore@csuohio.edu
Slides
Source code for this analysis
/