Identification of human control during walking
Jason K. Moore j.k.moore19@csuohio.edu
Human Motion and Control Laboratory [hmc.csuohio.edu]
Cleveland State University, Cleveland, Ohio, USA
June 6, 2014
Background
Doctoral work on identification of the human controller in the
bicycle balancing task.
TU Delft 2008-2009
UC Davis 2009-2012
Lower Extremity Exoskeletons
Your browser does not support the video tag.
Desired improvements
Natural gait patterns
Balance
Additional Benefits
Quantification of control can possibly be used to assess
subjects
Clips collected from [1] , [2] , [3] , and [4] .
Prior Art
Identification during standing: quite a lot
Identification during gait [Rouse, ...]
Piecewise nonlinear impedance control: [Goldfarb, ...]
Identification of active and passive dynamics in limb movement [Kearney, ...]
Step variation quantifications under perturbations: [Collins, Hof,
..]
Impedance control and ID
Rouse 2011-2014
Elliot Rouse and co-authors identified the "controller" for the ankle
from external perturbations.
Ankle model identification in stance phase
Ramp perturbations from a rotating force platform
~400 steps per subject
Identified canonical model: \(T = I (\ddot{\theta}) + C
(\dot{\theta}) + K \dot(\theta) \)
Neuromuscular System
Kearney and Hunter, “System Identification of Human Joint Dynamics.”,
1990.
Idealized Gait Feedback Control
Estimated
\(\varphi\): Phase of gait cycle
\(\mathbf{s}(\varphi)\): Joint angles and rates
\(\mathbf{m}(\varphi)\): Joint torques
\(w(t)\): Random belt speed
Unknown
\(\mathbf{K}(\varphi)\): Matrix of feedback gains
\(\mathbf{s}_0(\varphi)\): Open loop joint angles and rates
\(\mathbf{m}_0(\varphi)\): Open loop joint torques
Typical Dynamic Gait Lab Measurements
Ground reaction loads at each foot
Inertial musculoskeletal marker positions
Body segment angular velocity
Point accelerations
Muscle activation: EMG
Travel (or belt) speed
Computed Estimates
Joint torques
Joint angles, angular velocities, angular accelerations
Muscle forces and lengths
Center of pressure
What sensors are likely most important for human gait control?
Proprioception (muscle spindles, Golgi tendon): relative position of body
parts, muscle tension (gait timing)
Vestibular (semicircular canals, otoliths): angular rotation and
rate, linear acceleration (horizontal and vertical), gravity
direction
Sight: global and body relative orientation, position
Touch: force on feet
Sensors available to external prosthetics
Relative joint position
Body fixed angular velocity
Body fixed point accelerations
Force transducers and pressure sensors
Closed Loop System Identification
Closed loop system id is possible, but one must be aware of several
issues. Here are two common methods:
Direct Approach: measure \(u\), \(y\) where \(P\) and \(C\) are unknown
Indirect Approach: measure \(r\), \(y\) where either \(P\) or \(C\)
is known
Direct Approach
Measure \(u(t)\) and \(y(t)\), ignore feedback, and fit a model to the
data.
If the direct method is used in the frequency domain the external
perturbations must be high enough to bias the identification towards the
controller, rather than the plant. (Kearny 1990, Ljung 1999, van der
Kooij 2005)
\[ G(s) = \frac{y(s)}{u(s)} =
\frac{P(s) \Phi_r(\omega) - C(s) \Phi_v(\omega)}
{\Phi_r(\omega) + |C(s)|^2 \Phi_v(\omega)}
\]
If \( \Phi_r(w) >> \Phi_v(\omega) \) : \( G(s) = P(s) \)
If \( \Phi_v(w) >> \Phi_r(\omega) \) : \( G(s) = -\frac{1}{C(s)} \)
Direct Approach
But time domain identification may be possible if the bias is reduced
by one or all of the following:
The closed loop data is informative
\(r\) is persistently excited
Nonlinear or time varying or complex (high order) regulators
Using suitable pre-filtering, i.e. inclusion of a good noise model
Reducing the feedback contribution to the input spectrum \(\Phi
u\)
Large signal to noise ratio
Controller Equations
\[
\mathbf{m}(t) = \mathbf{m}_0(\varphi) + \mathbf{K}(\varphi) [\mathbf{s}_0(\varphi) - \mathbf{s}(t)] \\
\]
\[
\mathbf{m}(t) = \mathbf{m}^*(\varphi) - \mathbf{K}(\varphi) \mathbf{s}(t)
\]
where
\[
\mathbf{m}^*(t) = \mathbf{m}_0(\varphi) + \mathbf{K}(\varphi) \mathbf{s}_0(\varphi)
\]
Gain Matrix
Sensors
Assume that a lower limb exoskeleton can sense relative orientation
and rate of the right and left planar ankle, knee, and hip angles.
\(\mathbf{s}(t) = \begin{bmatrix} s_1 & \dot{s}_1 & \ldots & s_q & \dot{s}_q \end{bmatrix} \) where \(q=6\)
Controls (plant inputs)
Assume that the exoskeleton can generate planar ankle, knee, and hip joint
torques.
\(\mathbf{m}(t) = \begin{bmatrix}m_1 & \ldots & m_q \end{bmatrix} \) where
\(q=6\)
Gain Matrix [Proportional-Derivative Control]
\(
\mathbf{K}(\varphi) =
\begin{bmatrix}
k(\varphi)_{s_1} & k(\varphi)_{\dot{s_1}} & 0 & 0 & 0 & \ldots & 0\\
0 & 0 & k(\varphi)_{s_2} & k(\varphi)_{\dot{s_2}} & 0 & \ldots & \vdots\\
0 & 0 & 0 & 0 & \ddots & 0 & 0\\
0 & 0 & 0 & \ldots & 0 & k(\varphi)_{s_q} & k(\varphi)_{\dot{s}_q} \\
\end{bmatrix}
\)
Linear Least Squares
With \(n\) time samples in each gait cycle and \(m\) cycles there are
\(mnq\) equations and which can be used to solve for the \(nq(p+1)\)
unknowns: \(\mathbf{m}^*(\varphi)\) and \(\mathbf{K}(\varphi)\). This is
a classic overdetermined system of linear equations that can be solved
with linear least squares.
\[\mathbf{A}\mathbf{x}=\mathbf{b}\]
\[\hat{\mathbf{x}}=(\mathbf{A}^T\mathbf{A})^{-1}\mathbf{A}^T\mathbf{b}\]
\(n=20,m\sim=400,q=6,p=12\)
\(\mathbf{A}\) (48000 x 1560): joint angles and rates
\(\mathbf{b}\) (48000 x 1): joint torques
\(\mathbf{x}\) (1560 x 1): \(\mathbf{K}(\varphi)\) and \(\mathbf{m}^*(\varphi)\)
Experimental Protocol
Full body 3D motion capture: 47 markers [1]
Dual 6 DoF force plates on an actuated treadmill
2 minutes of unperturbed walking
8 minutes (~500 gait cycles) walking under longitudinal perturbations
Three walking speeds: 0.8, 1.2, 1.6 m/s
11 subjects (male: 7, female: 4)
Pseudo-random longitudinal perturbations: \(\pm 15\%\) nominal belt speed
Random Belt Speed Variations
Random Belt Speed Variations
Your browser does not support the video tag.
Data Processing
Fill missing markers
Filter marker positions and ground reaction loads 6 hz low pass
filter
Compute joint angles, rates, and torques using 2D inverse
dynamics
Section data into variable duration gait cycles based on right foot
heel strikes
Re-sample each gait cycle at 20 equally spaced samples
Construct the design matrix (regressor), \(\mathbf{A}\) and the
output vector, \(\mathbf{b}\)
Solve for \(\mathbf{m}^*(\varphi)\) and
\(\mathbf{K}(\varphi)\)
Compute regression statistics and visualize
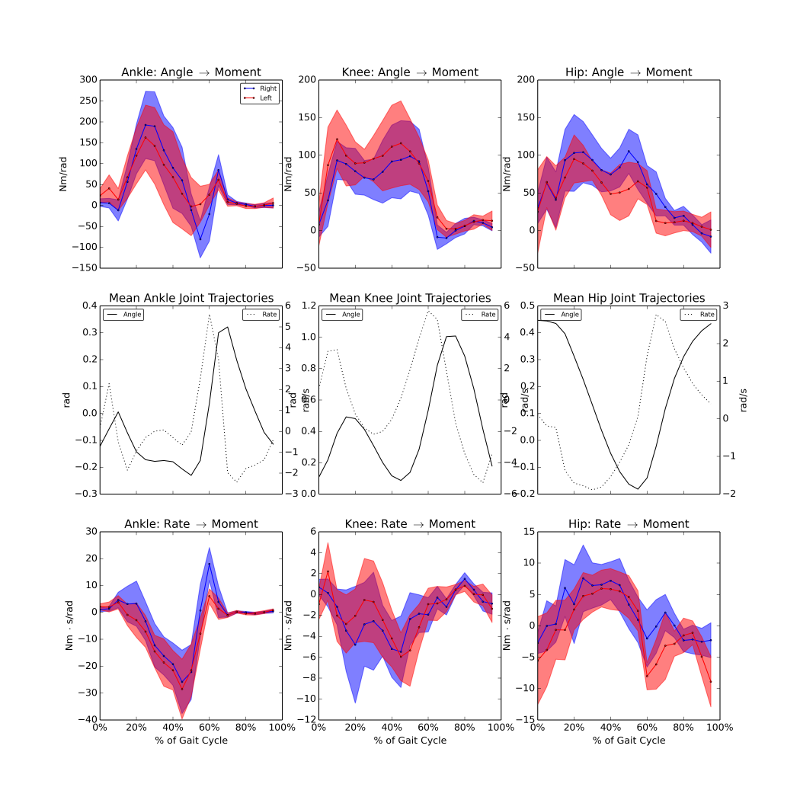
Measurement Variations
Unperturbed
Perturbed
Gains: v=0.8 m/s
Gains: v=1.2 m/s
Gains: v=1.6 m/s
Gain variation with speed
How good is the model?
Model Fit Improvements With Control
Identify \(\mathbf{m}^*\): \(nq\) parameters, mean VAF ~70%
Identify \(\mathbf{m}^*\) and joint isolated \(\mathbf{K}\):
\(3nq\) parameters, mean VAF ~75%
Identify \(\mathbf{m}^*\) and \(\mathbf{K}\): \(nq(p+1)\)
parameters, mean VAF ~80%
Summary
External perturbations must be higher that sensor noise to have any
hope of estimating control in this fashion.
Similar gain patterns in each leg.
Similar gain patterns and magnitudes in different subjects.
The gains are low magnitude in the swing phase and higher in
magnitude in the stance phase.
Negative velocity gains do not make much sense yet. More
investigation is needed.
The model can predict the joint torques for independent data.
Can we put this controller into an exoskeleton?
Future
Different Controller Structures
Additional sensors: acceleration, foot pressure, etc
Add in neural time delays
Remove clock from controller (state dependent)
Non-linear control models: e.g. neural network.
Use indirect system identification approach with plant model.
Simulate plant with open loop controls plus identified feedback.
Try out the controller on the Indego exoskeleton.
Indirect Identification: Shooting
Closed Loop Simulation + Genetic Algorithms, requires musculoskeletal model
Closed Loop EoM: \( \dot{x} = f(x, u, t, k) \)
Simulation Outputs: \( y = g(x, u, t) \)
Measured marker positions, ground reaction loads, etc: \(y^m\)
Cost function: \( J = \frac{1}{w_1}\sum_{i=0}^n || y_i - y_i^m || + \frac{1}{w_2}
\int_0^T T^2 dt + \frac{1}{\mathrm{stability}} + \ldots\)
Free parameters: \(k_j \ldots k_m\)
Advantages
Results in a stable model with working controller
Few optimization parameters
Optimization can be parallelized
Disadvantages
Computational load is really high: real time simulation for 8 min
100 hz may take 400 hrs with 3000 optimization iterations[1]
Genetic algorithms may only get close to the global minimum
Controller depends on plant fidelity
[1] Wang et al., “Optimizing Locomotion Controllers
Using Biologically-Based Actuators and Objectives.”, 2012.
Indirect Identification: Direct Collocation
Constrained optimization of discretized model + gradient based large
scale optimizer
Cost Function: \[ J = \sum_{i=0}^n || y_i - y_i^m || \]
Constraints: \[ 0 = f(\dot{x}, x, u, t, k) \]
Optimizers: Sequential Quadratic Programming, Interior Point
Optimization, etc
Free parameters: \(x_1 \ldots x_n \), \(k_1 \ldots k_m\)
Advantages
No simulation required: lower computational cost, 10 of hours
instead of hundreds of hours [1]
May get to the global optimum
Disadvantages
Large number of unknowns \(n \times p + m\)
Gradients of cost function and constraints required
Stable simulation may not be guaranteed
[1] Ackermann and van den Bogert, “Optimality
Principles for Model-Based Prediction of Human Gait.”, 2010
Information
Contact
Slides
Source code for this analysis
Data
Collaborators
Antonie J. van den Bogert
Sandra K. Hnat